
用途
PID参数的最佳整定方法有阶跃响应法和临界比例带法两种。
1.概要
基于阶跃响应法的PID最佳整定步骤
● 将调节器设定为手动模式,稳定测量值。
● 测量值稳定后,在手动模式下阶段性地增大(或减小)输出信号,如下图所示记录流程响应数据,直到测量值稳定。
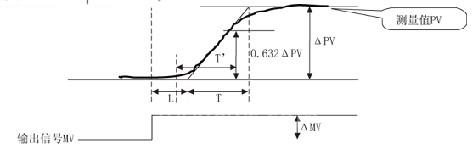
如上图所示,在流程响应数据中画上切线,求得过程增益Kp=ΔPV/ΔMV、死区时间L、延迟时间(时间常数)T。把ΔPV设定为100%,延迟时间T’(=T)为响应达到63.2%的时间。
● 基于响应数据,通过下表求出PID参数后,利用自动模式确认控制结果。
Ziegler Nichols的最佳PID参数

2.基于临界比例带法的PID最佳整定步骤
在实际过程中无法得到阶段性响应数据时,采用此方法。
● 先将P、I设定为最大,D设定为最小,然后选择自动模式。
● 将P(增加调节增益)逐渐调小,到测量值开始振荡之前停止。
● 将I从最大逐渐减小,到测量值开始振荡之前停止。
● 将D从最小逐渐增大,到测量值开始振荡之前停止。
● 再次微调P,到测量值开始振荡之前停止。
[补充]
● 在串级控制回路中,先对二次调节器的PID参数进行最佳整定后,再对一次调节器进行最佳整定。
● 多个控制回路间相互干扰时,一方面进行最佳PID参数整定,另一方面需要降低调节灵敏度。
● 响应较快的流量控制、压力控制、液位控制通常使用PI控制,响应慢的温度控制及分析仪控制则使用PID控制。
(转载)

