
REMOTE TCP功能即远程TCP功能,使用此功能可使机器人手臂夹持工件至固定在地面上的TCP(如胶枪、打磨机等)处进行相关作业(如涂胶、打磨等),并保持运动的稳定性和轨迹的恒定性。
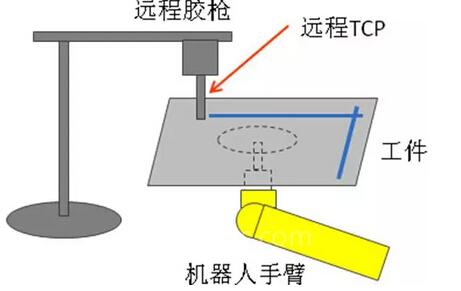
使用REMOTE TCP,有以下特点:
由于TCP相对于地面是固定的,因此工具的校准更容易;
机器人无需携带很重的工具;
即使不使用REMOTE TCP功能,仍可以通过移动机器人夹持的工件来进行相关作业。但如果旋转工件,工具不能做相应的动作。
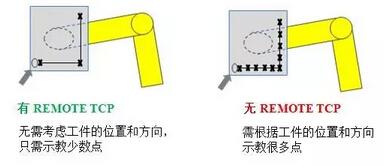
有无REMOTE TCP,最直观的体现在旋转工件方面,如示意图所示:
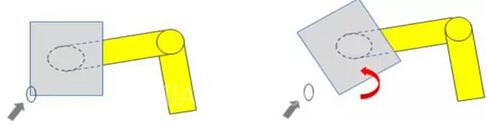
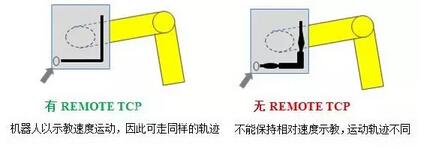
随着工件位置的变化造成的旋转中心的改变,机器人不能绕着旋转中心旋转
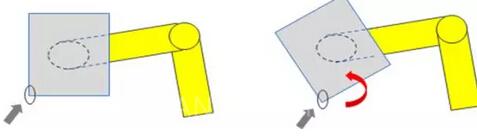
机器人可以绕着使用REMOTE TCP示教出来的点旋转
那么使用REMOTE TCP,能给操作者带来什么好处呢?
第一,能轻易地进行示教操作。
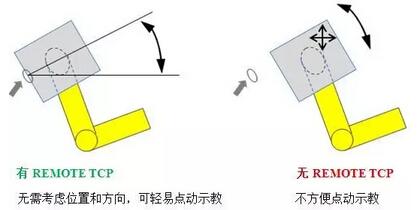
第二,减少示教点。
第三,运动轨迹相同。
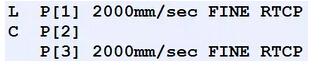
REMOTE TCP的设定较为容易,设定的方法与用户坐标系类似,使用时只需要在TP程序中添加RTCP指令就可以了,如下图所示:
在使用REMOTE TCP的过程中,需要注意的是不能在关节运动和腕关节运动下使用,且不支持与Line Tracking等功能一起使用。REMOTE TCP,可以大幅减少示教时间,使用起来非常的方便。
(转载)




