
自动控制的根本是为了使测量值与目标值(设定值)保持一致而对输出进行控制。
有关控制的基本用语如下。
PV:测量值(Process Variable)
SV:设定值(Setting Variable)
MV:控制输出、调节器输出(Manipulate Variable)
DEV:偏差(测量值-设定值)(Deviation)
P:比例动作(Proportional)
PB:比例带(Proportional Band)
I:积分动作(Integrate)
D:微分动作(Derivative)
1) 双位(ON/OFF)控制动作
控制输出有ON(100%)/OFF(0%)两个位置。
对炉温进行ON/OFF控制时,双位控制的控制输出是: 当测量值比设定值低时加热器为ON,测量值比设定值高时为OFF。简易调节器采用的就是这种方式。
利用这种方式控制的炉温,会以某个温度为中心上升、下降,从而形成波形变化。
像锅炉一样,当热容量很大时,即使进行双位(ON/OFF)控制,温度变化幅度也比较小,大致能够控制在一定的温度。
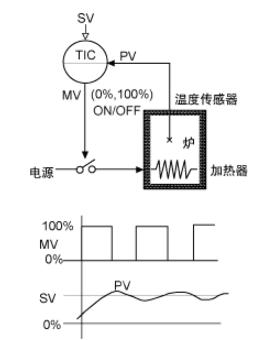
双位(ON/OFF)控制示例
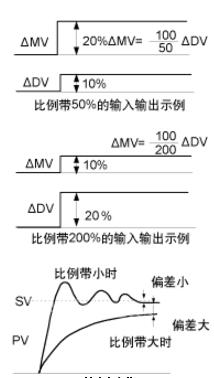
2) 比例(P)控制
比例控制是控制输出与设定值、测量值的偏差成比例变化的控制方式。
例如,偏差改变+10%,控制输出从50%变为60%时,比例增益为1。增益为控制输出变化量/偏差变化量,即10%/10%=1。比例增益1相当于比例带100%,在调节器中,使用该比例带,称为PB(Proportional Band)。
比例带与比例增益的关系
比例带(%)=100/比例增益
△控制输出=(100/比例带(%))×Δ偏差
比例带0%是指,在ON/OFF动作状态下,比例带大时控制输出变化量少,可实现稳定的控制。但是当比例带过大时,设定值和测量值之差(即偏差)会增大。
比例控制相当于单纯的可变增益增幅电路,并可以认为放大器增益的倒数为比例带。
比例动作
3) 积分(I)控制
消除比例控制偏差的控制动作称为积分控制。积分动作可以在存在偏差时,一直对输出进行修正,能自动消除偏差。
由于对偏差进行积分,并修正控制输出,所以也称为I(Integrate)控制或者自动复位。
一般使用的是将比例控制和积分控制组合在一起的调节器,也称为PI控制器。
积分时间越接近零,积分控制则越强,过强时,过程控制结果变为振动状态。相反如果积分时间过长,则需要较长时间消除偏差。
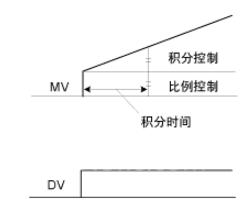
积分动作
4) 微分(D)控制
包括二阶系统及时滞时间在内,响应速度慢、热容量大的过程中,如果只依靠比例+积分控制达到稳定,需要花费较长时间,从而不能进行有效的控制。为此,在控制输出中加入对温度变化速度的微分控制,以改善控制性能。
这样将输入进行微分,在输出中增加修正动作的控制动作称为微分或者D动作。 例如,温度上升时,根据上升速度,在温度下降的方向上修正控制输出。这是一种超前控制动作。
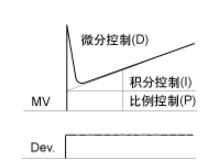
微分动作
在实际的调节器中,微分动作不是理论上的微分,而是不完全微分,微分输出与比例输出相等前所用的时间称为微分时间。微分时间为零时,微分控制不起动作,相反,微分时间增长时,微分控制会起动作。如果微分控制执行的太久,过程控制结果会变为振动状态。
(转载)

