
目录
1. 机械臂算法简介
2. 运动学部分
2.1.1. Rigid Body Tree (刚体树)
2.1.2. 反向运动学算法
2.1.3. Simulink示例

1 机械臂算法简介
MATLAB在2016年就推出了Robotics System Toolbox(RST),其中有很多关于机械臂方面的算法。而且随着客户需求的增加,也在加入一些新的功能。为了试图让读者了解更多RST在机械臂方面的支持,让我们来看一下机械臂方面的算法概貌。

这些名词听起来都比较深奥,但是在机械臂的世界里,这些都非常有用。让我们看一个简单的例子。下图是一个简单的机械臂示意:机械臂的end-effector(末端机构)受到4个旋转关节和3个连杆的共同作用,可以到达不同的作业地点,也可以处于不同的旋转角度。

为了分析end-effector的具体位置和角度,我们看到:它相对底座开始,做了4次旋转(rotation)和3次转置(translation)。那这4次旋转和3次转置的总和,我们可以用一个矩阵来表示:

这个矩阵也叫Homogeneous Transformation(齐次变换)。有时候,对于旋转会有不同的表达方式,例如欧拉角(Euler Angles)、四元数(Quaternion)、旋转矩阵(Rotation Matrix)等等;表达转置,也可使用转置向量(Translation Vector)。有了RST这些都可以轻松通过不同的函数进行互换。下图为具体的函数列表:

例如:
将欧拉角转为Homogeneous Transformation。

由于机械臂的连杆长度是已知的,只要确定了各个关节转动的角度,我们就可以确定end-effector的最终位置和方向。这个我们称之为forward kinematics(正向运动学)。反过来,如果我们知道了end-effector的最终位置和方向,我们也可以推导各个关节的角度,这个我们称之为inverse kinematics(反向运动学)。机械臂关注的主要是反向运动学。
如果end-effector,需要走一段比较长的路程(path),从甲点运行到乙点。我们为了使得机械臂的end-effector 的路径平滑,需要规划一系列的路径点(waypoints),这个我们叫做路径规划(trajectory planning)或者叫运动插补(interpolation)。
例如下图:蓝色的曲线叫path,而各个时间经过的路径点叫trajectory。如何设计经过这些路径点的trajectory,比较显而易见的指标是 “平滑” 。那什么是 “平滑” ,它可能意味着 “速度连续” 、 “加速度连续” 、 “没有顿挫” 等等。这些指标,都会转化成数学算法。RST也会有相应的算法支持,作者在MATLAB 2019a发布后,会另外写文章描述。

机械臂的关节位置我们一般用电机来驱动。电机通过产生力矩来转动机械装置,驱动机械臂。不同场合或者时机,需要的力矩不尽相同。
例如:
机械臂水平放置的时候需要关节电机产生力矩来抵消地球引力;
当机械臂需要迅速移动的时候,需要的力矩比缓慢移动的要大,当机械臂弯曲或者平展时候,重心发生变化,由于惯量(I = mr²)的不同,需要的关节力矩也不相同;
另外,在很多场合,机械臂需要和人交互(collaborative robots),在碰到人体的时候,需要做出安全的保护动作,并对力矩进行调整。
这些需要考虑力矩的因素,我们称之为动力学(dynamics)。和运动学类似,动力学分为正向动力学(forward dynamics)和反向运动学(inverse dynamics)。RST里支持两种都有相应的MATLAB函数和Simulink block。作者也会另外写文章详细介绍RST关于动力学的部分。
2 运动学部分
2.1.1Rigid Body Tree (刚体树)
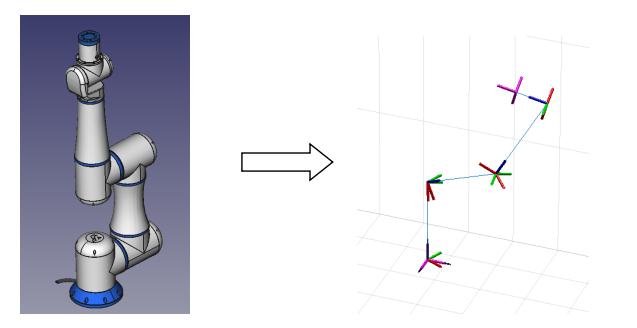
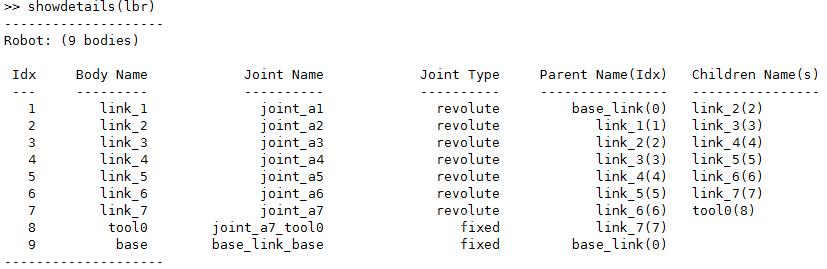
我们说研究运动学(主要是反向运动学),就是研究end-effector的位置改变会带动各个关节的角度如何改变。RST用Rigid Body Tree这样一个对象,在这个对象上可以使运动学设计易用且可视化。下图展示了机械臂的刚体树样例,可以在MATLAB界面中展示各个body的详细参数。
一般来说,Rigid Body Tree都是直接从机械臂的
(转载)




